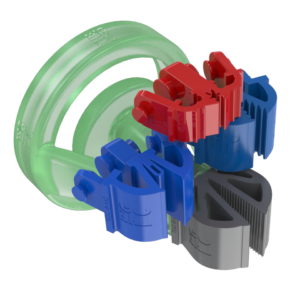
The Gripper Lips
Dual Belt Lip
From € 600,00
Four Fingers Lip

From € 700,00
Jaw Lip

From € 750,00
Try out our solutions
– Rent A Gripper case for up to two weeks

The Any-Mount
Any-Mount

From € 650,00
Any-Mount Compact

From € 750,00
The Spareparts
Air Actuator Insert

€ 199,00
Tool Flange Adaptor – Cobots
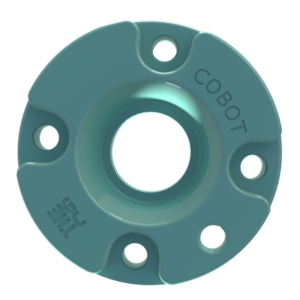
€ 99,00
Tool Flange Adaptor – ABB/Rethink
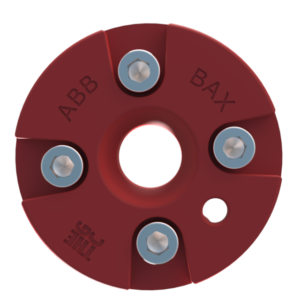
€ 99,00
Tool Flange Adaptor – Omron Adept
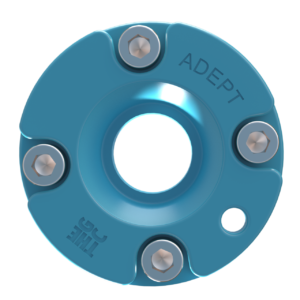
€ 99,00
Tool Flange Adaptor – CAD Model

€ 50,00
Mounting Rig
€ 399,00
Lock Ring

€ 199,00
Pneumatic Valve Kit

€ 299,00
Protected: Actuator next
€ 350,00
Finger nails

From € 75,00